官方网站-首页官方网站-首页
官方网站-首页官方网站-首页在2025年3月5日第十四届全国人民代表大会第三次会议上的政府工作报告中,特别提到了“具身智能”。
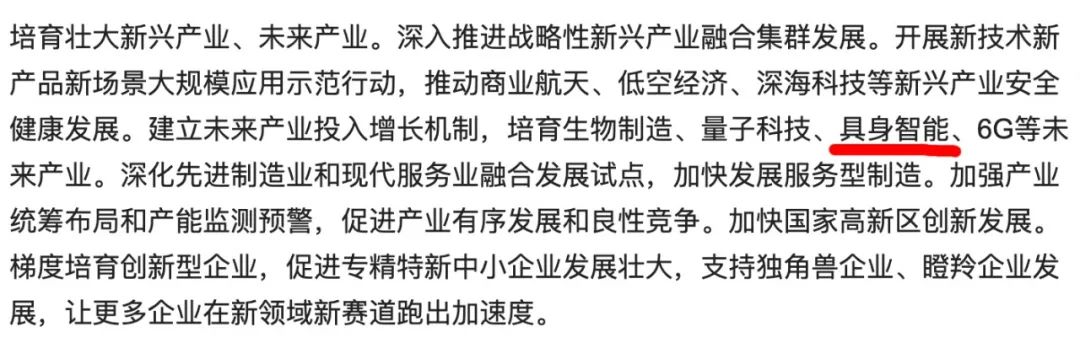
图片截自中华人民共和国中央人民政府网站 www.gov.cn
那么具身智能到底是什么呢?

图库版权图片,转载使用可能引发版权纠纷
回想我们看过的科幻电影,经典的机器人角色有很多——从冷酷强悍的杀手,到矫健的拳击运动员,从稳重冷静(jìng)的(de)维(wéi)修(xiū)工(gōng),到(dào)神(shén)烦(fán)碎(suì)嘴(zuǐ)的(de)礼(lǐ)仪(yí)官(guān)……不(bù)过(guò),这(zhè)些(xiē)作(zuò)品(pǐn)中(zhōng)的(de)想(xiǎng)象(xiàng)很(hěn)美(měi)好(hǎo),但(dàn)实(shí)现(xiàn)起(qǐ)来(lái)真(zhēn)的(de)很(hěn)难(nán)——甚(shén)至(zhì)光(guāng)是让机器人像人那样迈开两条腿走路,都历尽坎坷。
反观我们人类的小宝宝,成长过程中也没有人给他们编什么程序,经过多次尝试和摔倒之后,他们自己就学会了爬和走,很快就能跑得飞快并躲开障碍。而“具身智能”技术,就参考了这个过程——这项技术能让机器人像人那样,用身体感知世界,在互动学习中成长。
具身智能是什么,
是怎么跟机器人结合的?
具身智能,英文全称是“Embodied Artificial Intelligence”,从这个全称我们可以看出,其实具身智能这个词中的“智能”就是“ AI ”(人工智能)的意思。而说到 AI ,大家早都不陌生了,从 ChatGpt 到 DeepSeek ,都是 AI 的一种。它们就像没有身体的“大脑”,虽然能从外部接收数据并解决问题,但它们作为没有身体的软件系统,缺乏通过身体与环境交互的能力和反馈机制。
图库版权图片,转载使用可能引发版权纠纷
举个例子,下围棋的 AlphaGo ,就必须有一位工作人员在场(chǎng)上(shàng)帮(bāng)它(tā)落(luò)子(zi),因(yīn)为(wèi) AlphaGo 是(shì)个(gè)纯(chún)算(suàn)法(fǎ)系(xì)统(tǒng),尽(jǐn)管(guǎn)能在服务器上快速训练成千上万场棋局,甚至能够战胜世界冠军,但它自己甚至根本不具备在真实世界中拿起一枚棋子的能力。而具身智能机器人,则能通过摄像头、触觉及其他传感器等“感官”收集环境信息,并用肢体与环境互动,进而形成“感知-行动”的闭环。
了解了上面的信息,再解释具身智能相关的概念就比较容易(yì)理(lǐ)解(jiě)了(le),所(suǒ)谓(wèi)“具(jù)身(shēn)智(zhì)能(néng)”是指一种基于物理身体进行感知和行动的智能系统,其通过智能体与环(huán)境(jìng)的(de)交(jiāo)互(hù)获(huò)取(qǔ)信(xìn)息(xi)、理(lǐ)解(jiě)问(wèn)题(tí)、做(zuò)出(chū)决(jué)策(cè)并(bìng)实(shí)现(xiàn)行(xíng)动(dòng),从(cóng)而(ér)产(chǎn)生(shēng)智(zhì)能(néng)行(xíng)为(wèi)和(hé)适(shì)应(yīng)性(xìng)。总(zǒng)结(jié)一(yī)下(xià),具(jù)身(shēn)智(zhì)能(néng)就(jiù)是(shì)“能(néng)够(gòu)感(gǎn)知(zhī)、推(tuī)理(lǐ)并(bìng)与(yǔ)物(wù)理(lǐ)世(shì)界(jiè)互(hù)动(dòng)的(de)智(zhì)能(néng)系(xì)统(tǒng)”。而(ér)具(jù)身(shēn)智(zhì)能(néng)机(jī)器(qì)人(rén),可(kě)以(yǐ)视(shì)为(wèi)具(jù)身(shēn)智(zhì)能(néng)系(xì)统(tǒng)的(de)载(zài)体(tǐ)。
那(nà)么(me),“具(jù)身(shēn)智(zhì)能(néng)机(jī)器(qì)人(rén)”可(kě)以(yǐ)简(jiǎn)单(dān)理(lǐ)解(jiě)为(wèi)“给(gěi) AI 套(tào)了(le)一(yī)具(jù)身(shēn)体(tǐ)”或(huò)“给(gěi)机(jī)器(qì)人(rén)装(zhuāng)上(shàng)了(le)一(yī)个(gè) AI ”吗(ma)?这(zhè)种(zhǒng)认(rèn)识(shi)也(yě)是(shì)不(bù)全面(miàn)的(de)。举(jǔ)个(gè)例(lì)子(zi),现(xiàn)在(zài)有(yǒu)一(yī)些(xiē)机(jī)器(qì)人(rén)产(chǎn)品(pǐn),能(néng)够(gòu)做(zuò)一(yī)些(xiē)简(jiǎn)单(dān)的(de)动(dòng)作(zuò),也(yě)连(lián)上(shàng)了(le) AI ,甚(shén)至(zhì)可(kě)以(yǐ)跟(gēn)人(rén)聊(liáo)得(de)有(yǒu)来(lái)有(yǒu)回(huí),但(dàn)它(tā)们(men)仍(réng)然(rán)不(bù)能(néng)算(suàn)是(shì)具(jù)身(shēn)智(zhì)能(néng)。
这(zhè)是(shì)因(yīn)为(wèi)它(tā)缺(quē)少(shǎo)了(le)至(zhì)关重(zhòng)要(yào)的(de)一(yī)环(huán),也(yě)就(jiù)是(shì)“具(jù)身(shēn)智(zhì)能(néng)”中(zhōng)的(de)“具(jù)身(shēn)性(xìng)”(Embodiment)。而(ér)具(jù)身(shēn)性(xìng)的(de)核(hé)心(xīn)在(zài)于(yú),智(zhì)能(néng)必(bì)须(xū)通(tōng)过(guò)物(wù)理(lǐ)身(shēn)体(tǐ)与(yǔ)环(huán)境(jìng)的(de)实(shí)时(shí)交(jiāo)互(hù)和(hé)动(dòng)态(tài)反(fǎn)馈(kuì)来(lái)生(shēng)成(chéng),而(ér)非(fēi)依(yī)赖(lài)预(yù)设(shè)程(chéng)序(xù)或(huò)离(lí)线(xiàn)数(shù)据(jù),要(yào)靠(kào)深(shēn)度(dù)融(róng)合(hé)人(rén)工(gōng)智(zhì)能(néng)与(yǔ)机(jī)器(qì)人(rén)两(liǎng)大(dà)前(qián)沿(yán)技(jì)术(shù)才(cái)能(néng)实(shí)现(xiàn)这(zhè)个(gè)目(mù)标(biāo),简(jiǎn)单(dān)“拼(pīn)”在(zài)一(yī)起(qǐ)是(shì)不(bù)行(xíng)的(de)。
为(wèi)什(shén)么(me)我(wǒ)们(men)需(xū)要(yào)具(jù)身(shēn)智(zhì)能(néng)机(jī)器(qì)人(rén)?
其(qí)实(shí)现(xiàn)在(zài)已(yǐ)经(jīng)有(yǒu)很(hěn)多(duō)机(jī)器(qì)人(rén)在(zài)帮(bāng)助(zhù)人(rén)类(lèi)劳(láo)动(dòng)了(le),但(dàn)很(hěn)多(duō)机(jī)器(qì)人(rén)工(gōng)作(zuò)的(de)时(shí)候(hou)依(yī)赖(lài)预(yù)先(xiān)编(biān)好(hǎo)的(de)程(chéng)序(xù),我(wǒ)们(men)经(jīng)常(cháng)能(néng)看(kàn)到(dào)工(gōng)厂(chǎng)生(shēng)产(chǎn)线(xiàn)中(zhōng)的(de)机(jī)械(xiè)臂(bì)(也(yě)是(shì)机(jī)器(qì)人(rén)的(de)一(yī)种(zhǒng)),它(tā)们(men)高(gāo)效(xiào)默(mò)契(qì)地(de)运(yùn)行(xíng),能(néng)有(yǒu)条(tiáo)不(bù)紊(wěn)地(de)进(jìn)行(xíng)搬(bān)运(yùn)、焊(hàn)接(jiē)等(děng)工(gōng)作(zuò)。这(zhè)类(lèi)机(jī)械(xiè)臂(bì)通(tōng)常(cháng)高(gāo)度(dù)依(yī)赖(lài)编(biān)程(chéng)行(xíng)动(dòng),虽(suī)然(rán)可(kě)以(yǐ)分(fēn)毫(háo)不(bù)差(chà)地(de)运(yùn)行(xíng),也(yě)集成(chéng)了(le)一(yī)些(xiē)基(jī)本(běn)的(de)传(chuán)感(gǎn)器(qì)以(yǐ)便(biàn)了(le)解(jiě)工(gōng)作(zuò)状(zhuàng)态(tài),但遇到突发情况却仍然“不懂”避让行人(在无需工人的生产线上通常也没有必要)。
这也是为什么很多工厂的机械臂操作区都要装上隔离网,标上警戒线。因为这些机械臂工作时“只认程序不认人”,虽然有大量安全相关的措施和规章制度保障,但如果有人疏忽大意踏入它们(men)的(de)工(gōng)作(zuò)范(fàn)围(wéi),仍(réng)可能发生悲剧——面对严格按程序从 A 点运动到 B 点的机械臂,挡在路上的人体实在太脆弱了。
试想一下,你敢让这样一个一个“只认程序”的机器人,走进你的家中,帮你打理家务,照顾老人小孩吗?当然,现在很多流水线上用的工业机器人也有了碰撞检测等功能,变得更加安全,但它们仍然是按预设程序执行,缺乏动态学习能力,更适合执行简单的重复任务。而一旦面临复杂的环境和任务,只靠预设程序是行不通的,因为在复杂环境下,很难穷尽所有的规则。
这里再举个例子,在汽车制造业中,诸如搬运物料、抛光、焊接、喷漆等加工工序,大部分可以用机器人轻松完成。但是到了发动机、底盘、电器等装配工序,大部分工作仍难以用机器人完成,因为这些工作更加复杂,更需要“随机应变”以及沟通合作,机器人还无法胜任,需要人工。
而具身智能,则更加灵活,具有适应环境解决复杂任务的潜力,要想让机器人实现更加广泛的应用并走进千家万户,需要发展具身智能。
具身智能机器人,“活学活用”
由于具身智能和机器人的技术非常复杂,也有很多不同的技术路线,下面仅以具身智能开源学习项目 LeRobot 为例,简单介绍一下具身智能机器人的基本特点。
假设我们的任务目标是让机械臂捡起黄色的小积木块,再放进盒子里。我们可以编程序直接“命令”机械臂严格按照规定路径和动作运行——很多生产线上的工业机器人正是如此,但只要积木换个地方,机械臂按之前的行动路径就会捡个空。我们也可以编程序让机械臂能识别出积木块,再执行“捡”的动作并放进盒子里,这样更加灵活,但仍需要事先编写相应的程序。
而 LeRobot 则是靠人操作主动臂,“手把手”地教从动臂完成一次捡起积木放进盒子的过程,从动臂运动的整个过程会被 2 个不同位置的摄像头全程监控并记录。改变几次积木位置,操纵机械臂重复数十到上百次捡起和放下的动作,就能获得足够的资料。
LeRobot 的(de)一(yī)次(cì)训(xun)练(liàn)过(guò)程(chéng) 来(lái)自(zì) Huggingface 官(guān)方(fāng)教(jiào)程(chéng)
再(zài)通(tōng)过(guò)算(suàn)法(fǎ)“学(xué)习(xí)”这(zhè)些(xiē)资(zī)料(liào),就(jiù)能(néng)让(ràng)这(zhè)套(tào)系(xì)统(tǒng)“学(xué)会(huì)”捡(jiǎn)积(jī)木(mù)——如(rú)果(guǒ)有(yǒu)积(jī)木(mù)块(kuài)出(chū)现(xiàn)在(zài)机(jī)械(xiè)臂(bì)面(miàn)前(qián),它(tā)就(jiù)会(huì)自(zì)己(jǐ)拿(ná)起(qǐ)积(jī)木(mù)来(lái)放(fàng)进(jìn)盒(hé)子(zi)。
LeRobot 一(yī)次(cì)成(chéng)功(gōng)的(de)自(zì)主拾(shi)取(qǔ)过(guò)程(chéng) 来(lái)自(zì) Huggingface 官(guān)方(fāng)教(jiào)程(chéng)
上(shàng)图(tú)中(zhōng),研(yán)究(jiū)人(rén)员(yuán)并没有操作主臂,甚至积木的位置也改变了,但机械臂仍然能自主完成任务。
从上面这个简单的例子中,我们能了解具身智能的一些最基本的特点。首先,具身智能可以通过身体与环境的实时交互学习(多次捡起积木),不用事先编写大量规则穷尽所有可能。其次,具身智能能够在执行任务的过程中动态调整策略(积木换个地方也能捡到)。
当然,这只(zhǐ)是(shì)个简单的(de)例(lì)子(zi),实(shí)际(jì)上(shàng)具(jù)身(shēn)智(zhì)能(néng)机(jī)器(qì)人(rén)的(de)技(jì)术(shù)路线(xiàn)有(yǒu)很(hěn)多(duō),除(chú)了(le)像(xiàng)上(shàng)边(biān)的(de)例(lì)子(zi)中(zhōng)基(jī)于(yú)真(zhēn)实(shí)世(shì)界(jiè)交(jiāo)互(hù)的(de),还(hái)有(yǒu)在虚拟环境中进(jìn)行(xíng)的(de)仿(fǎng)真(zhēn)训(xun)练(liàn)以(yǐ)及(jí)二(èr)者(zhě)相(xiāng)结(jié)合(hé)的(de)等(děng)等(děng)。此(cǐ)外(wài),具(jù)身(shēn)智(zhì)能(néng)机(jī)器(qì)人(rén)还(hái)能(néng)实(shí)现(xiàn)远(yuǎn)比(bǐ)捡(jiǎn)起(qǐ)积(jī)木(mù)扔(rēng)进(jìn)盒(hé)子(zi)里复杂得多的功能。比如行走、适应地形,模拟人的动作等等,不久之后,相信各类具身智能机器人,就能在更多的领域发挥重要作用。
最后总结一下,具身智能和机器人技术的融合,将会让未来的机器人变得更加能干,甚(shén)至(zhì)能(néng)理(lǐ)解(jiě)和(hé)模(mó)拟(nǐ)简(jiǎn)单(dān)的(de)感(gǎn)情(qíng)交(jiāo)互(hù)。而(ér)且(qiě),对(duì)具(jù)身(shēn)智(zhì)能(néng)和(hé)机(jī)器(qì)人(rén)的(de)持(chí)续(xù)投(tóu)入(rù),更(gèng)将(jiāng)带(dài)动(dòng)从(cóng)软(ruǎn)件(jiàn)到(dào)硬(yìng)件(jiàn)的(de)整(zhěng)个(gè)产(chǎn)业(yè)链(liàn)的(de)发(fā)展(zhǎn)。
策(cè)划(huà)制(zhì)作(zuò)
作(zuò)者(zhě)丨(gǔn)丁(dīng)崝 科普作者
审核丨于乃功 北京工业大学机器人工程专业负责人,北京人工智能研究院机器人研究中心主任,博士生导师
策划丨丁崝
审校丨徐来、林林
本文封面图片及文内图片来自版权图库
转载使用可能引发版权纠纷