官方网站-首页官方网站-首页
官方网站-首页官方网站-首页【导语】4月19日,北京亦庄见证了历史性的时刻——全球首个人形机器人半程马拉松比赛成功举办。在这场人类与科技融合的体育盛宴中,数万名选手与人形机器人共同奔跑在21.1公里的赛道上。尽管机器人选手的成绩尚未超越人类,但这一壮举标志着人形机器人技术的巨大飞跃。从达·芬奇的机械骑士到现代的智能机器人,科学家和工程师们历经60余年探索,让人形机器人从蹒跚学步走向赛道奔跑。本文将带您回顾人形机器人的发展历程,并聚焦当下国产人形机器人的崛起,探讨未来人机共跑的新篇章。
4 月 19 日,北京亦庄举办了全球首个人形机器人半程马拉松比赛。在这近 21.1 公里的赛道上,数万名人类选手和人形机器人将一起奋力奔跑。这场比赛,是人类与机械,体育与科技的融合。
尽管赛场上的人形机器人成绩不如人类(第一名花了2小时40分42秒跑完),但人形机器人能参加半马比赛已经非常不容易了。从蹒跚学步到在赛道上奔跑,人类科学家和工程师努力了 60 多年的时间。
人形机器人,走起来不容易
在很久以前,人们就开始制造类似于人形的机械设备了,比如在 500 多年前,达·芬奇就设计了“机械骑士”。在 90 多年前,也出现过巨大的机械“铁皮人”,但它们算不上真正意义上的机器人,也没有办法自己行走。
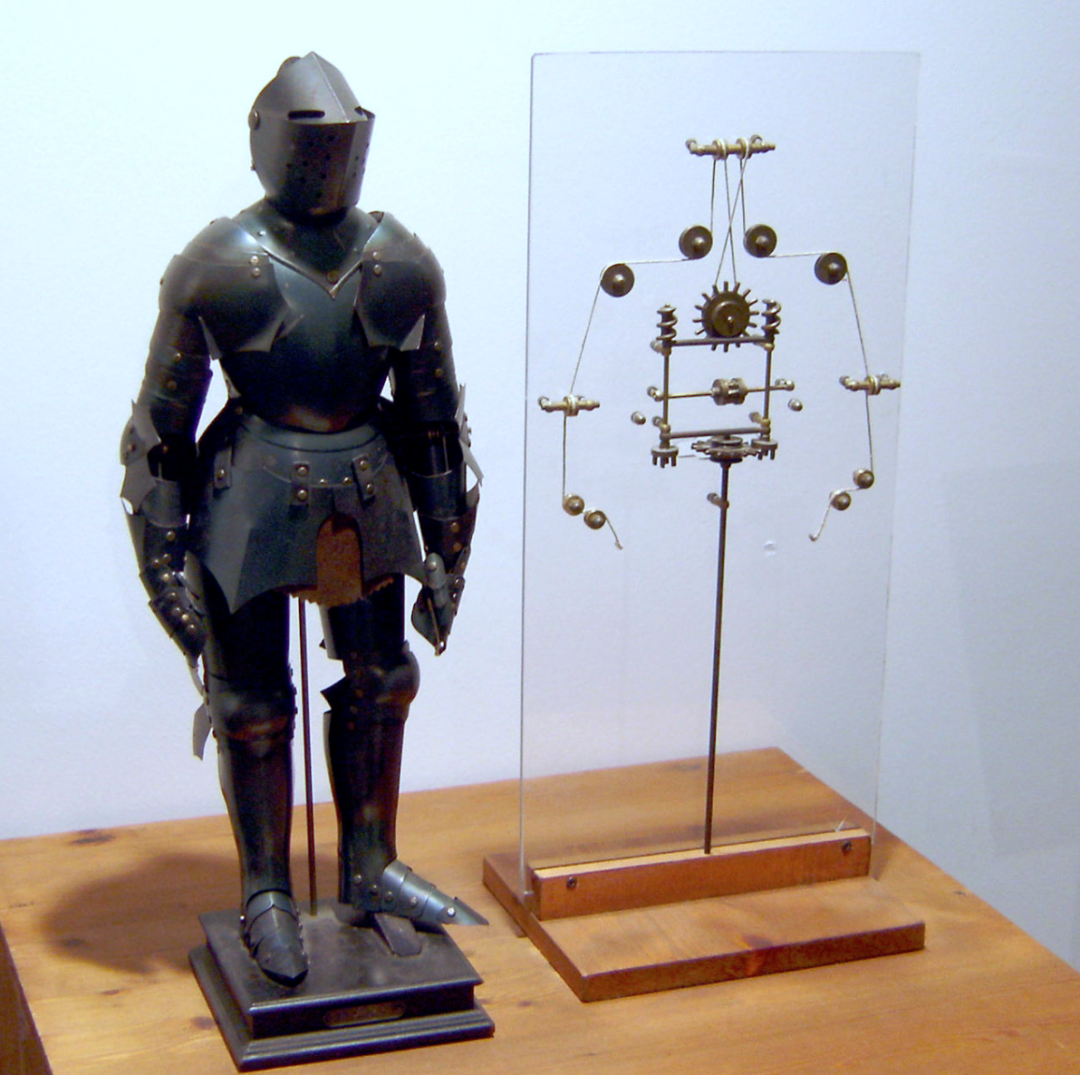
达·芬奇的“机械骑士”,图片来源:Wikipedia
和其他机器人一样,人形机器人需要解决的难题有很多,但人形这个特殊的形态,让它们在站立和行走上,要面对更多挑战。
人形机器人和四足机器人不同,四足机器人的重心更容易保持在支撑面内,而人形机器人属于双足机器人,支撑面积更小,重心一旦超出支撑面,很容易摔倒。
20 世纪 60 年代末,米奥米尔·武科布拉托维奇(Miomir Vukobratović)和达沃·尤里奇(Davor Juričić),提出了零力矩点(Zero Moment Piont)概念,详细解释这个概念需要列很多公式,这里咱们知道它能帮助我们让机器人站稳的条件就行了。零力矩点后来成了双足、四足机器人的步态规划里的重要的概念,算是人形机器人发展史上一个重要的里程碑。而接下来,我们就回来顾一下,机器人是怎么一步一个脚印“走”起来的。
WL-3 主从式行走机器人
而且在制造全尺寸人形机器人之前,研究者先是使用了“半身”机器人对人形机器人的步态进行研究。
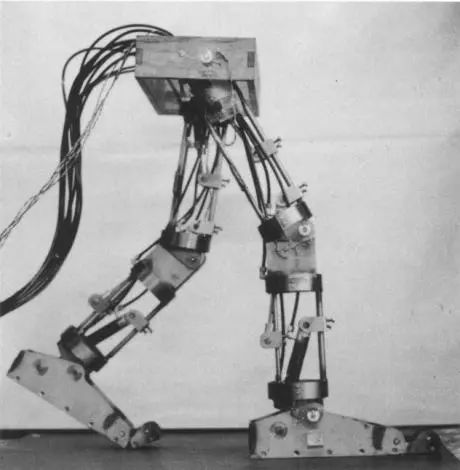
WL-3 主从式行走机器人,图片来源:Humanoid Robotics Institute, Waseda University
WABOT-1
世界上第一个全尺寸人形智能机器人,是 1972 年,日本早稻田大学建造的 WABOT-1。虽然叫人形机器人,但它看起来更像是个乐高积木块搭起来的“方块人”。
WABOT-1 机器人,图片来源:Humanoid Robotics Institute, Waseda University
虽然看起来有点方,但是它能通过早期的传感器探测周围的障碍物,并且能够颤颤巍巍地迈腿行走,在人形机器人的发展史上,有着特别的地位。
ASIMO
人形机器人领域另一个重要的里程碑,要数本田公司的 ASIMO 了。
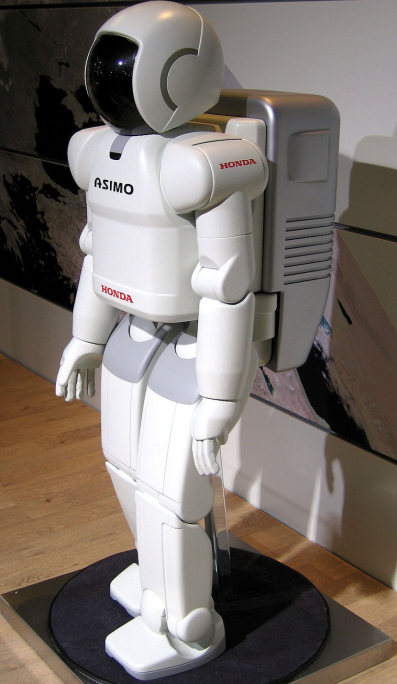
ASIMO 机器人,图片来源:Wikipedia
它其实并不是本田公司研制的第一款人形(xíng)机(jī)器人,早在 1980 年代(dài),本(běn)田(tián)公(gōng)司(sī)的(de)人(rén)形(xíng)机(jī)器(qì)人(rén)计(jì)划(huà)就(jiù)已(yǐ)经(jīng)开(kāi)启(qǐ)了(le)。本(běn)田(tián)公(gōng)司(sī)也(yě)是(shì)从(cóng)“半(bàn)人(rén)形(xíng)”机(jī)器(qì)人(rén)(E 系(xì)列(liè))开(kāi)始(shǐ)的,到了 90 年代,才开始开发更接近人形的 P 系列机器人。
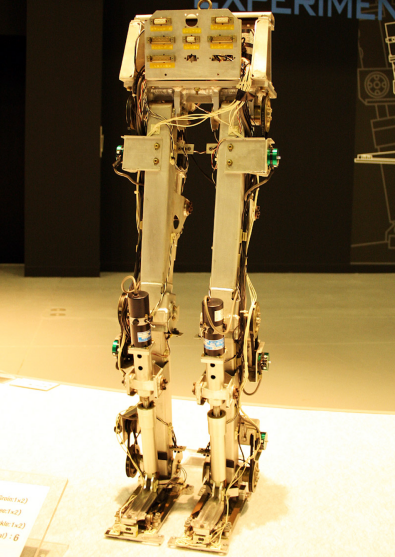
只有两条腿的本田E系列机器人 E-0,图片来源:Wikipedia

本田 1993 的“大脑袋”P-1 机器人,图片来源:Wikipedia
2000 年发布的 ASIMO,就是在 P 系列机器人的基础上改进优化而来的。它的外形像一个穿着宇航服的人类,能够自己检测周围的环境,规划路径行走。并且能够与周围的人类互动、打招呼。
自从发布之后,ASIMO 机器人开始了它在全世界范围内的巡演展示。虽然它的运动能力不及现在能转手绢以及后空翻的 H1,但在当时,它的表现已经引起了轰动。让人形机器人“出圈”了一把。
苏菲亚与 ATLAS
进入 21 世纪之后,人形机器人的发展就更迅速了,它们要么在外形、神态语言上更接近人类。或者在运动能力与环境互动方面更接近人类。
比如,2015 年汉森机器人公司的索菲亚机器人诞生,就属于前者,它模拟人类的外表和说话方式,并且能够识别对话者的情绪。

索菲亚机器人,图片来源:Wikipedia
在 2017 年,索(suǒ)菲(fēi)亚(yà)获(huò)得(de)了(le)沙(shā)特(tè)阿(ā)拉(lā)伯(bó)公(gōng)民(mín)的(de)身(shēn)份(fèn),成(chéng)为(wèi)了(le)第(dì)一(yī)个(gè)获(huò)得(de)某(mǒu)个(gè)国(guó)家(jiā)公(gōng)民(mín)身(shēn)份(fèn)的(de)机(jī)器(qì)人(rén)。虽(suī)然(rán)这(zhè)件(jiàn)事(shì)曾(céng)经(jīng)引(yǐn)发(fā)过(guò)争(zhēng)议,但也算是从另一个角度引起了人们对人形机器人的关注。
几乎就在索菲亚引起热议同一时间,波士顿动力公司(Boston Dynamic)也发布了(le)自(zì)己(jǐ)的(de) ALTAS 展(zhǎn)示(shì)视(shì)频(pín),相(xiāng)比(bǐ)于(yú)之(zhī)前(qián)的(de) ASIMO,ALTAS 的(de)运(yùn)动(dòng)能(néng)力(lì)确(què)实(shí)有(yǒu)了(le)飞(fēi)跃(yuè)式(shì)的(de)提(tí)升(shēng)。能(néng)够(gòu)“障(zhàng)碍(ài)跑(pǎo)”,拿(ná)起(qǐ)箱(xiāng)子(zi)搬(bān)到(dào)指(zhǐ)定(dìng)位(wèi)置(zhì),以(yǐ)及(jí)后(hòu)空(kōng)翻(fān)。

“工作”中的 ATLAS,图片来源:波士顿动力官网
但强大的 ATLAS 也有一个致命问题,成本过高。一台 ATLAS 的价格动辄上百万美元。相比之下,崛起的国产人形机器人,正在解决这一问题。
崛起的国产人形机器人
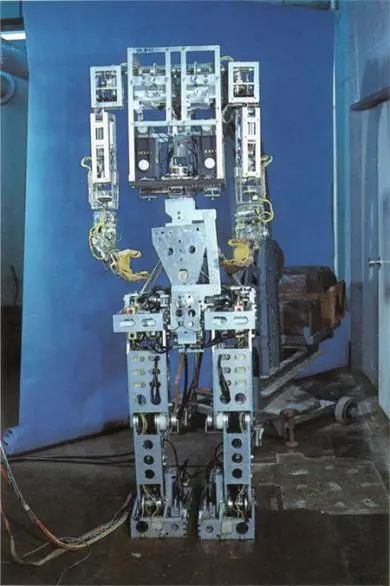
我们国家的全尺寸人形机器人出现得也不算晚,比如 2000 年就诞生了由国防科技大学研制的“先行者”。

国防科技大学研制的“先行者”机器人,图片来源:Wikipedia
以现在的视角,从外观上看,先行者确实是挺简陋的,但经过 20 多年的发展,我们国家的人形机器人已今非昔比了。现在的国产机器人,不光外形上看起来颇有“科技感”,运动能力也有了极大提升。
比如本次机器人半马夺冠的北京人形机器人创新中心的“天工机器人”,它能以每小时 6 公里的速度奔跑,冲刺速度最大能达到每小时 12 公里,同时还能应对上下台阶以及崎岖的路面。

天工机器人 拍摄者:丁崝
松延动力的 N2 个头小一些,只有 1.2 米高,但它同样有着高超的运动能力,除了跑步,还能原地后空翻。

N2 机器人 拍摄者:丁崝
此外,曾经在 2025 年央视春晚上“转手绢”的宇树科技机器人,同样也是运动高手。宇树科技的 H1 机器人不仅能转手绢,也能原地后空翻,还能以每秒 3.3 米(约每小时 11.9 公里)的速度前行。
宇树科技的另一款人形机器人 G1,行进速度也能达到每秒 2 米(约每小时 7.2 公里)。值得一提的是,宇树科技的 H1 和 G1 人形机器人,售价分别在 65 万元人民币和 9.9 万元人民币。相比于动辄上百万美元的 ALTAS,宇树科技的机器人会率先走进普通人的生活,这样高性能,低成本的人形机器人,也吸引来了国际同行的关注。
就在今年 2 月召开的 3DEXPERIENCE WORLD 2025 峰会上,波士顿动力公司的联合创始人马克·雷伯特(Marc Raibert)也表示,自己的研究所购买了宇树科技的人形机器人,进行“深入了解”。
虽然人形机器人现在的跑步姿势还有些稚拙,但也许不久的将来,它们就会在跑步这件事上反超人类,就像曾经国际象棋机器人、围棋机器人超越人类一样。
而每一次机器对超越人类,实际上都是人类智慧的一次突破。
参考文献
[1]https://www.unitree.com/cn/g1
[2]https://www.unitree.com/cn/h1
[3]https://www.humanoid.waseda.ac.jp/booklet/kato_2.html
[4]https://noetixrobotics.com/products-138.html
[5]https://x-humanoid.com/download/%E7%BD%91%E7%AB%99-lite%E5%A4%A9%E5%B7%A5%E7%94%A8%E6%88%B7%E6%89%8B%E5%86%8C_0326.pdf
策划制作
作者丨田达玮 科普创作者
审核丨于乃功 北京工业大学教授
策划丨丁崝
责编丨丁崝
审校丨徐来、林林
本文封面图片及文内图片来自版权图库
转载使用可能引发版权纠纷